Thursday, July 18, 2024
$30 Homebrew Automated Blinds Opener
UPDATE 2025-07-17: See Homebrew Automated Roller Blackout Blinds
In the spirit of my thermostat and dishwasher controller, I managed to cobble together a decent blinds opener in a short weekend almost entirely from spare parts on hand. This design is very much what I could do quickly with what I had, so probably not worth copying, but perhaps it can be an inspiration.
It is intentionally the world's slowest blinds opener: It's purpose is to open the blinds very gradually (and silently!) in the morning (because at this latitude, natural sunrise is wayy too early this time of year). Right now it takes about 8 minutes running at full speed, and can easily be slowed down just by running for, say, 30 seconds at a time between pauses.
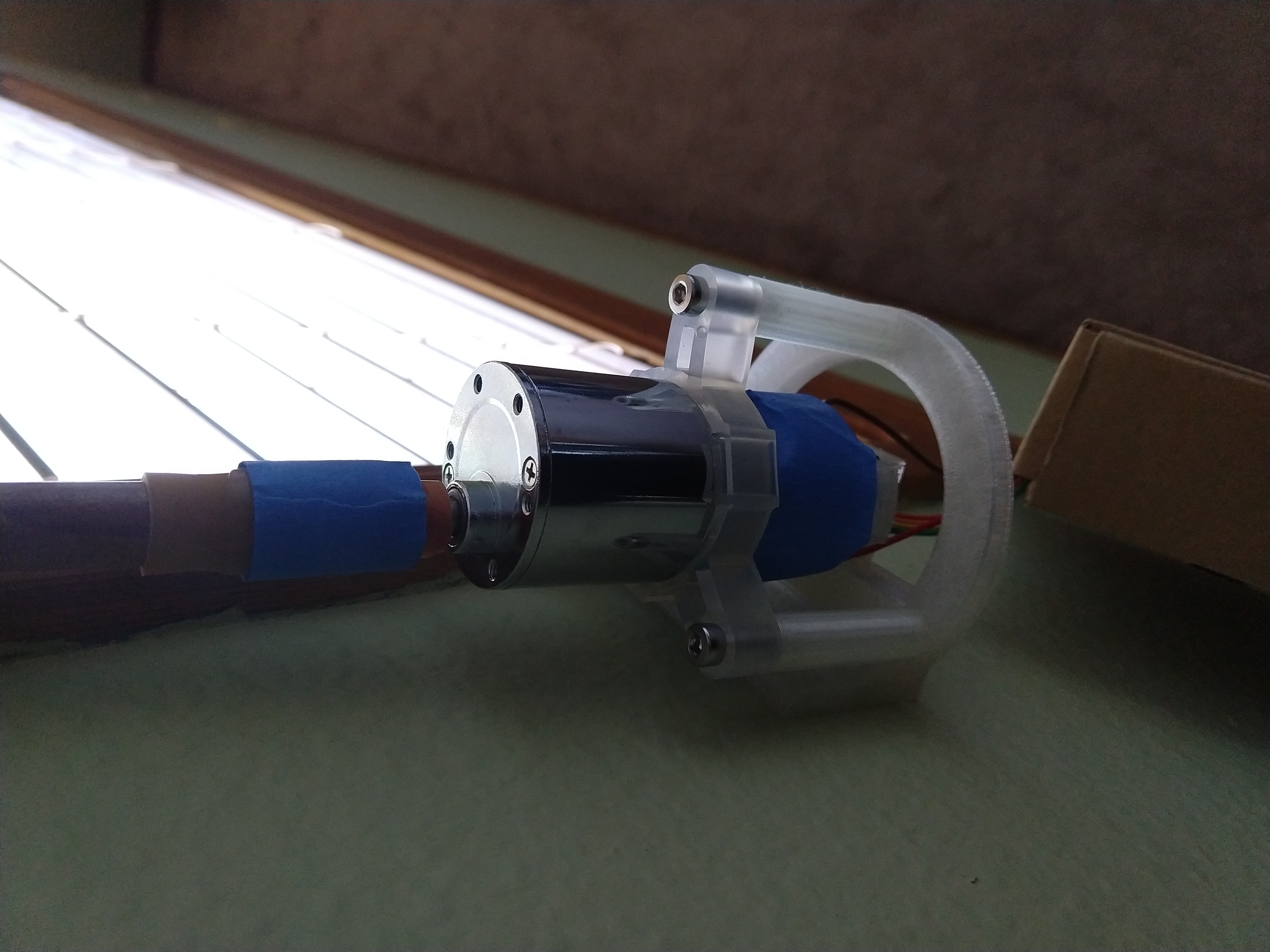
One key component is the silicone(?) motor mount, which I had previously salvaged from a dead Phillips water flosser and happened to be close enough to the right size for the geared motor I bought. That's the one hard-to-find component, and not included in the cost breakdown. The rest I very-quickly threw together in freecad and 3d printed for negligible cost. Only the magnet cuff required two takes (magnet was too loose) -- the rest I lucked out and got right on the first go. So the whole thing came together in a day and a half including software (helped that it only took minutes to integrate into my home automation system).
In the order I designed/printed things:
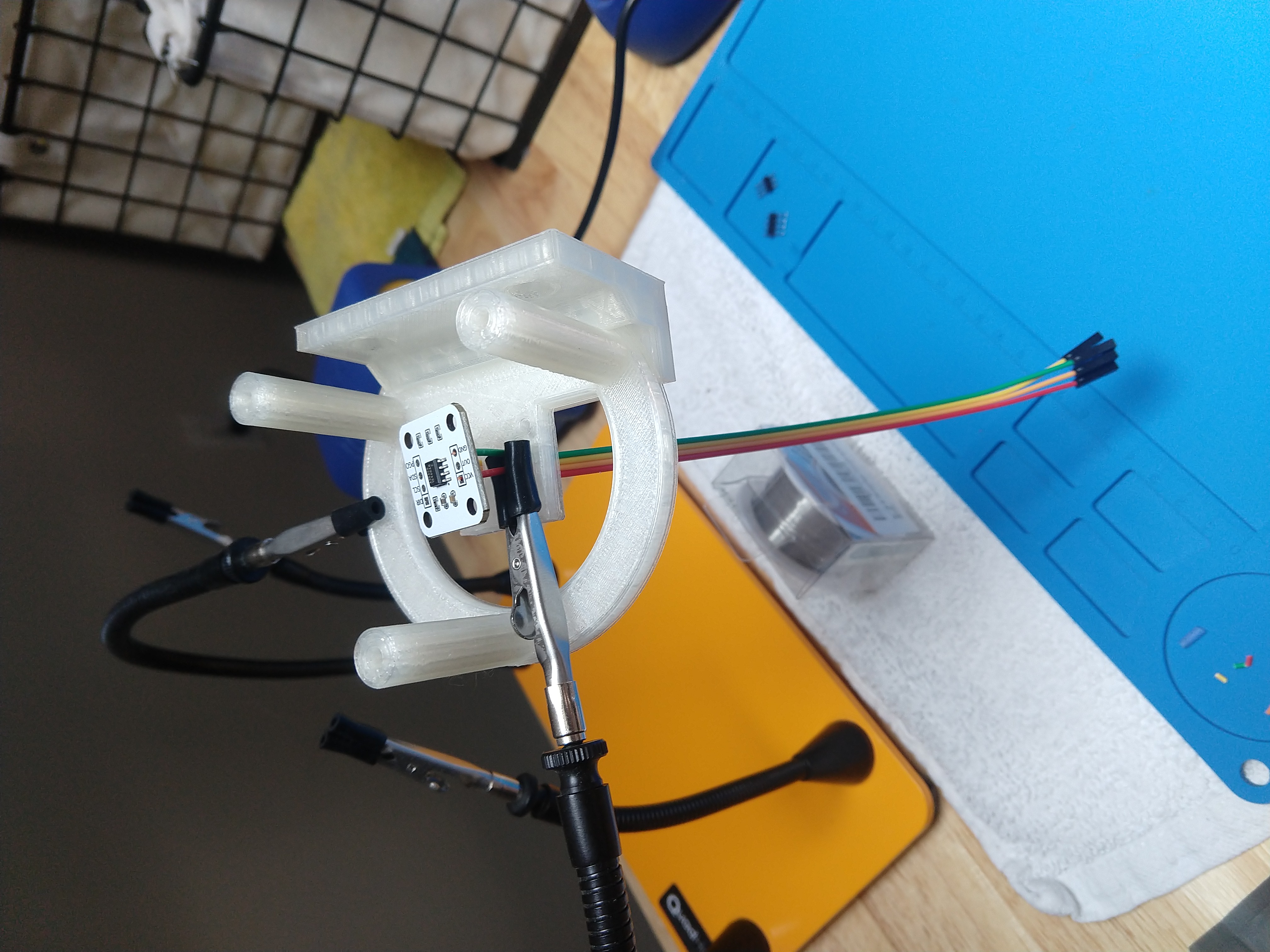
The cuff (and cap) that holds the magnet to the motor's butt (note this does not rotate with the motor shaft--it only measures the small rotation of the whole motor within the silicone mount shown below, from which we can infer the torque and detect when the blinds are closed). Ignore the other water flosser guts in the background:

The mount that holds the motor and encoder. Chose to solder the wires on the encoder so I didn't have to worry about push-connectors vibrating loose:
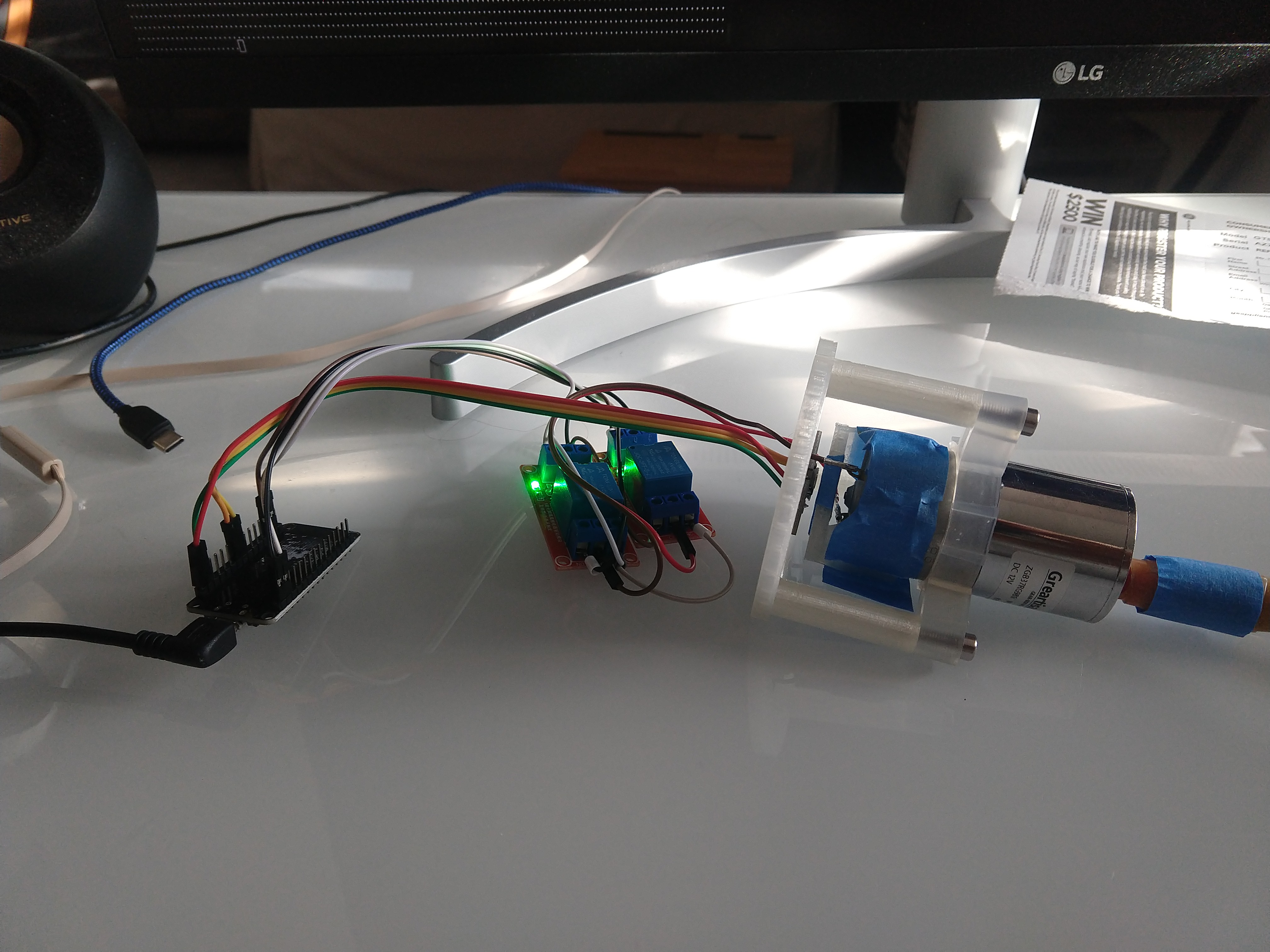
Two double-throw relays. The motor terminals go to the center, and +5v and ground go to the NO and NC respectively. In that config, one relay runs the motor forward, and the other reverse. And if you accidentally have both on at the same time, it just connects both motor terminals to 5v, which is harmless:
The mount above has an extra ridge (not really visible) which slots into this wall bracket:
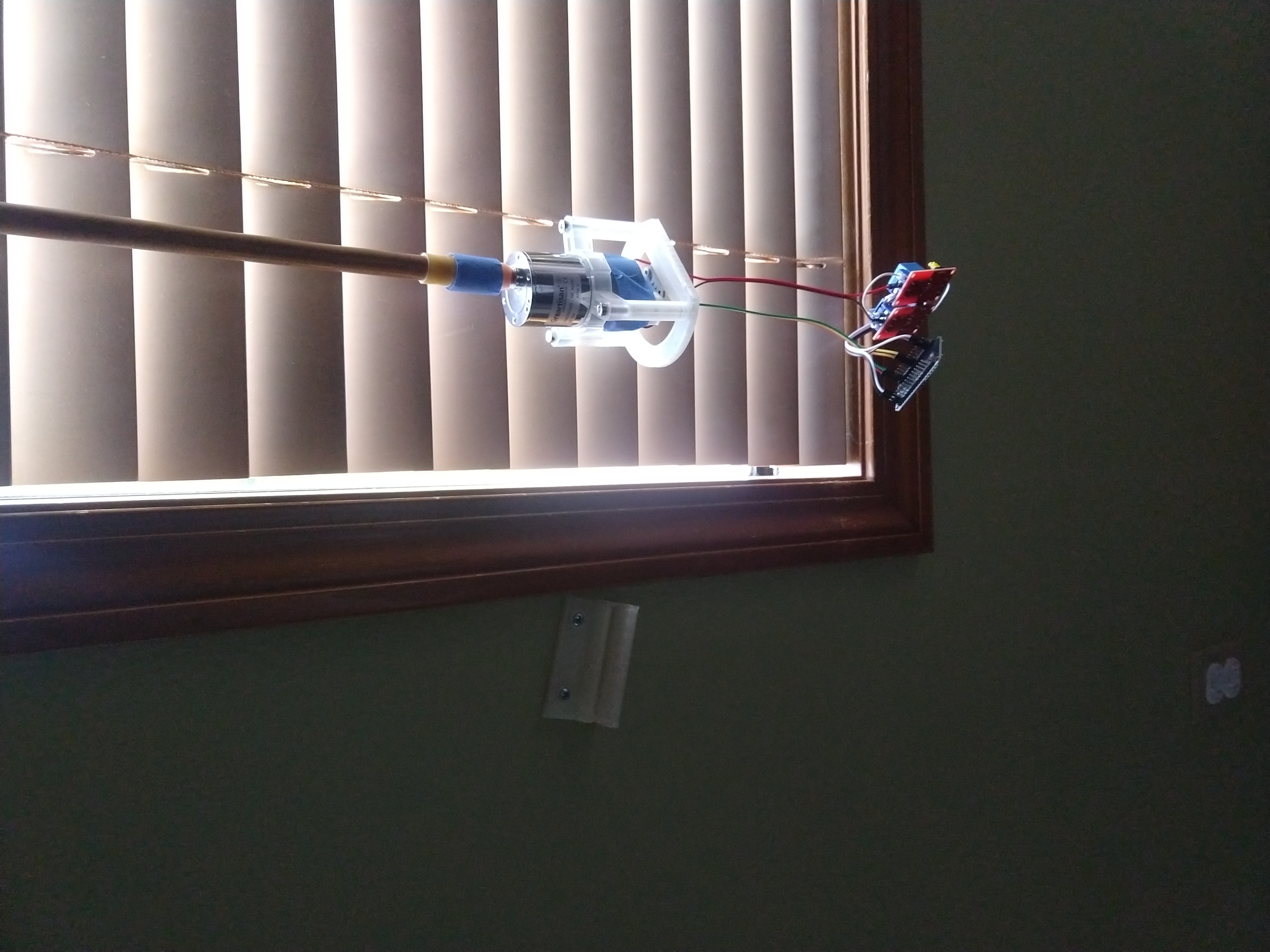
I tossed a box over the electronics until I have the time to make a more aesthetic cover for the whole shebang:

The whole design ended up shockingly simple. I thought I might need more components, but the 12v motor runs fine (and quietly!) on 5v and only draws about 50mA, and the encoder has pull-up resistors (for I2C) built in, and the relays work fine w/3.3v signals on 5v power, so it was truly just a matter of wiring everything together using the 5v and 3.3v pins of the ESP to tap power from the USB.
Motor w/gearbox: $15
Magnetic angle encoder: $2
Relays x2: <$4
ESP8266: ~$5
Spare USB power supply and cable: $?
Wires and ferrules: trivial
I connected the motor to the blinds wand with some surgical tubing (and some other random flexy tubing I had to pad the motor shaft up a bit) which mostly worked (and helps maintain vibration isolation for noise), but it's not quite strong enough to really cinch the blinds tight at the end so I wrapped a few turns of silicone tape over that and then some blue tape just to cover up the sticky. Probably this would have been better solved with one more layer of a larger diameter tubing, but I didn't have any on hand.
The other issue is, not surprisingly, the motor doesn't just rotate around its axis within its mount, it twists in various ways which move the magnet off-center from the encoder, which the encoder really doesn't like. The result is very non-monotonic (bad) and path-dependent (surprising, and very bad), but there was enough signal coming through I was still able to ballpark the torque and get it to shut off when the blinds are the right amount of tight. (And for opening them it's easy -- just run for 8 minutes and that puts them pretty reliably at mid position.)
Here at 7000 seconds, the blinds are cinched closed, and then I opened them a bit:
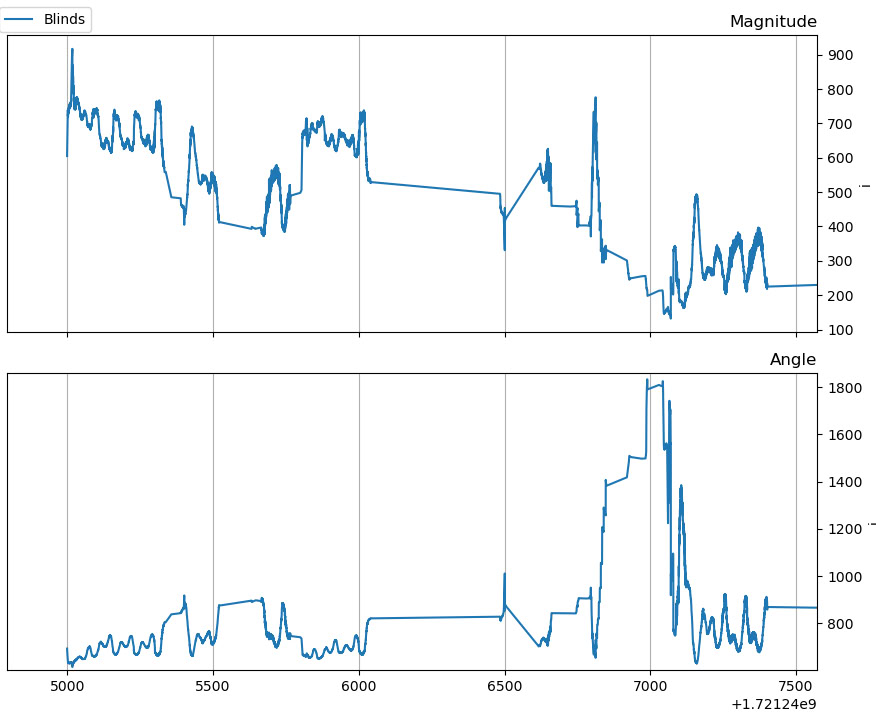
So I would not recommend the magnetic encoder approach. I just used it because I bought a 5 pack a while back and never used them. But I do like the torque as the main feedback mechanism, since it's the most important thing to know: You really do want it to stop if the torque goes high, no matter the reason. And once you have that, you can detect the closed position (in either direction) by "feel", and can find intermediate positions well enough just with timing. Not sure how else I could (so easily) measure the torque, though--if you have any suggestions, let me know.
With the soft mount, the motor vibration is totally isolated, and it all runs nearly silently. The relays are a bit loud, but the box muffles them pretty well, and right now there's just one faint click when it first turns on. The blinds themselves creak a bit when they're turned this slow, but quieter than typical rain sounds. Right now the occasional creaking of the blinds is the only way I even know it's running--it's that quiet!
So now I just send a target percent-open to my blinds on my HA network (or push the open or close button I added to my phone panel), and there they go. (And by default they close at dusk and open at desired-dawn.)
Not bad for a short-weekend project. (Though just gathering the photos, links, and writing this entry has extended that into a long-weekend. Ugh.)
UPDATE 2025-07-17: See Homebrew Automated Roller Blackout Blinds